DeepMind 的開源物理引擎 MuJoCo 已在 GitHub 發布

DeepMind 是 Alphabet 的子公司和 AI 研究實驗室,在 2021 年 10 月,它收購了用於機器人研發的 MuJoCo 物理引擎,並承諾該模擬器將作為免費、開源、社區驅動的項目進行維護。現在,DeepMind 聲稱開源計劃已完成,它的整個代碼庫 可在 GitHub 上獲得。
MuJoCo 是 「Multi-Joint Dynamics with Contact」 的縮寫,它是一個物理引擎,旨在幫助機器人、生物力學、圖形和動畫等領域的研究和開發(也包括其他需要快速準確模擬的領域)。MuJoCo 可用於幫助機器學習應用實現基於模型的計算,例如 控制綜合 、 狀態估計 、 系統識別 、 機制設計 、通過 逆動力學 來進行數據分析,以及 並行採樣 。它也可以用作標準模擬器,例如用於遊戲和互動式虛擬環境。(LCTT 譯註:這段話中涉及到不少專業辭彙,鑒於譯者水平有限,若有謬誤,請在評論中指出,同時也歡迎在評論中科普,一起學習~)
根據 DeepMind 的說法,以下是 MuJoCo 適合協作的一些功能:
- 能夠模擬複雜機制的綜合模擬器
- 可讀、高性能、可移植的代碼
- 易於擴展的代碼庫
- 豐富的文檔,包括面向用戶的和代碼注釋 —— 我們希望學術界和 OSS 社區的同事能夠使用這個平台並為代碼庫做出貢獻,從而改善所有人的研究
DeepMind 還說:
「作為沒有動態內存分配的 C 庫,MuJoCo 非常快。不幸的是,原始物理速度一直受到 Python 包裝器的阻礙:全局解釋器鎖(GIL)和非編譯代碼的存在,使得批處理、多線程操作無法執行。在下面的路線圖中,我們將解決這個問題。」
(LCTT 譯註: 這裡補充了原文沒有提及的路線圖和基準測試結果。)
路線圖:
- 通過批處理、多線程模擬釋放 MuJoCo 的速度潛力
- 通過改進內部內存管理支持更大的場景
- 新的增量編譯器,帶來更好的模型可組合性
- 通過 Unity 集成支持更好的渲染
- 對物理導數的原生支持,包括解析和有限差分
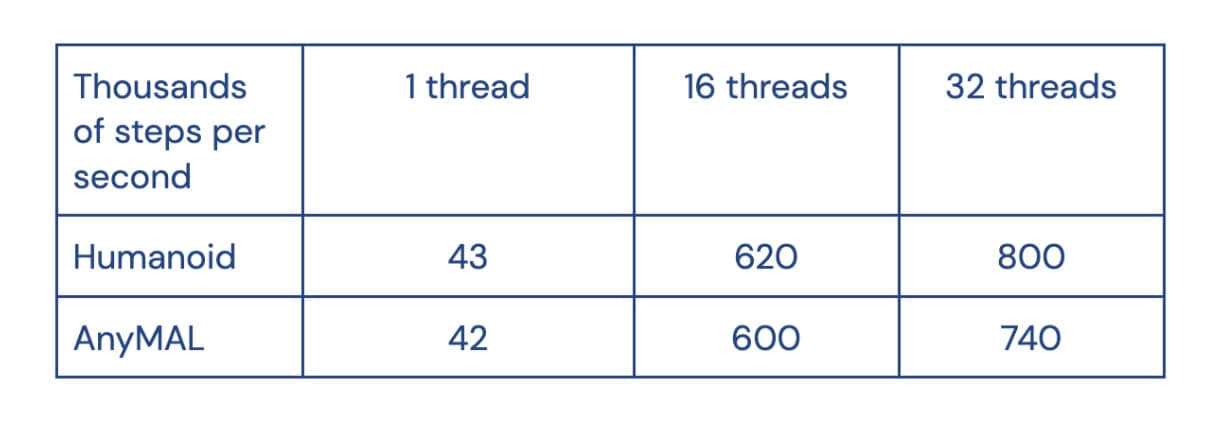
「目前,我們想分享兩個常見模型的基準測試結果。注意,這個結果是在運行 Windows 10 的標準 AMD Ryzen 9 5950X 機器上獲得的。」
via: https://www.opensourceforu.com/2022/05/deepminds-open-source-mujoco-is-available-on-github/
作者:Laveesh Kocher 選題:lkxed 譯者:lkxed 校對:wxy
本文轉載來自 Linux 中國: https://github.com/Linux-CN/archive
對這篇文章感覺如何?
You may also like




More in:Linux中國

捐贈 Let's Encrypt,共建安全的互聯網
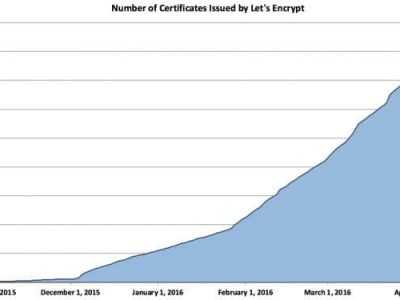
Let's Encrypt 正式發布,已經保護 380 萬個域名

關於Linux防火牆iptables的面試問答
Lets Encrypt 已被所有主流瀏覽器所信任