Linux中國
運行 Ubuntu 的 Husarion CORE2-ROS 使得機器人開發變得容易
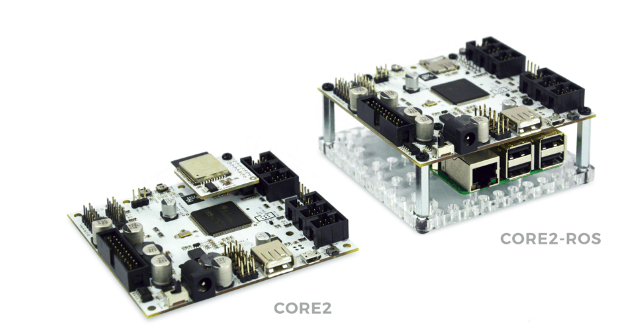
CORE2 控制器有兩種配置。第一款是採用 ESP32 Wi-Fi 模塊的,專用於需要低功耗和實時、安全遙控的機器人應用。第二款,稱為 CORE2-ROS,基本上是將兩塊板子集成到了一起:
- 使用實時操作系統(RTOS)的實時微控制器並集成電機、編碼器和感測器介面的電路板
- 帶有 ROS(Robot Operating System)包的運行 Linux 的單板計算機(SBC)和其他軟體工具。
「實時」電路板做底層工作。它包含高效的 STM32F4 系列微控制器,非常適用於驅動電機、讀碼器、與感測器通信,並控制整個機電或機器人系統。在大多數應用中,CPU 負載不超過幾個百分點,實時操作由基於 RTOS 的專用編程框架支持。我們還保證與 Arduino 庫的兼容性。大多數任務都在微控制器外設中處理,如定時器、通信介面、ADC 等,它具有中斷和 DMA 通道的強大支持。簡而言之,對於具有其他任務的單板計算機來說,這不是一項任務。
另一方面,很顯然,現代先進的機器人程序不能僅僅基於微控制器,原因如下:
- 自動機器人需要大量的處理能力來執行導航、圖像和聲音識別、移動等等,
- 編寫先進的軟體需要標準化才能有效 - SBC 在行業中越來越受歡迎,而對於為 SBC 編寫的軟體也是如此,這與 PC 電腦非常相似
- SBC 每年都變得越來越便宜 – Husarion 認為,結合這兩個世界在機器人技術方面是非常有益的。
CORE2-ROS 控制器有兩種配置:Raspberry Pi 3 或 ASUS Tinker Board。CORE-ROS 運行於 Ubuntu、Husarion 開發和管理工具以及 ROS 軟體包上。
下篇文章將介紹為何 Husarion 決定使用 Ubuntu 。
作者:Dominik Nowak 譯者:geekpi 校對:wxy
本文轉載來自 Linux 中國: https://github.com/Linux-CN/archive
對這篇文章感覺如何?
太棒了
0
不錯
0
愛死了
0
不太好
0
感覺很糟
0
You may also like




More in:Linux中國

捐贈 Let's Encrypt,共建安全的互聯網
隨著 Mozilla、蘋果和谷歌對沃通和 StartCom 這兩家 CA 公司處罰落定,很多使用這兩家 CA 所簽發證書的網站紛紛尋求新的證書籤發商。有一個非盈利組織可以為大家提供了免費、可靠和安全的 SSL 證書服務,這就是 Let's Encrypt 項目。現在,它需要您的幫助
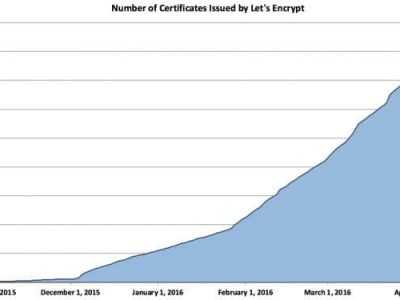
Let's Encrypt 正式發布,已經保護 380 萬個域名
由於 Let's Encrypt 讓安裝 X.509 TLS 證書變得非常簡單,所以這個數量增長迅猛。

關於Linux防火牆iptables的面試問答
Nishita Agarwal是Tecmint的用戶,她將分享關於她剛剛經歷的一家公司(印度的一家私人公司Pune)的面試經驗。在面試中她被問及許多不同的問題,但她是iptables方面的專家,因此她想分享這些關於iptables的問題和相應的答案給那些以後可能會進行相關面試的人。 所有的問題和相應的答案都基於Nishita Agarwal的記憶並經過了重寫。 嗨,朋友!我叫Nishita Agarwal。我已經取得了理學學士學位,我的專業集中在UNIX和它的變種(BSD,Linux)。它們一直深深的吸引著我。我在存儲方面有1年多的經驗。我正在尋求職業上的變化,並將供職於印度的P
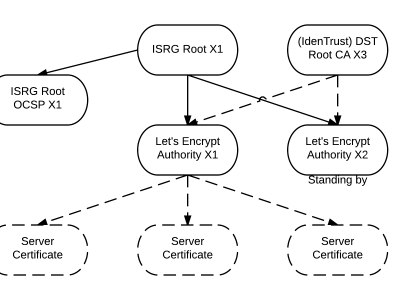
Lets Encrypt 已被所有主流瀏覽器所信任
旨在讓每個網站都能使用 HTTPS 加密的非贏利組織 Lets Encrypt 已經得了 IdenTrust的交叉簽名,這意味著其證書現在已經可以被所有主流的瀏覽器所信任。從這個裡程碑事件開始,訪問者訪問使用了Lets Encrypt 證書的網站不再需要特別配置就可以得到 HTTPS 安全保護了。 Lets Encrypt 的兩個中級證書 ...
關注 LinuxStory 微信公眾號,獲取最新的 Linux 和操作系統資訊,每天為您帶來熱騰騰的開源新聞與新鮮溫暖的科技故事。