Linux中国
运行 Ubuntu 的 Husarion CORE2-ROS 使得机器人开发变得容易
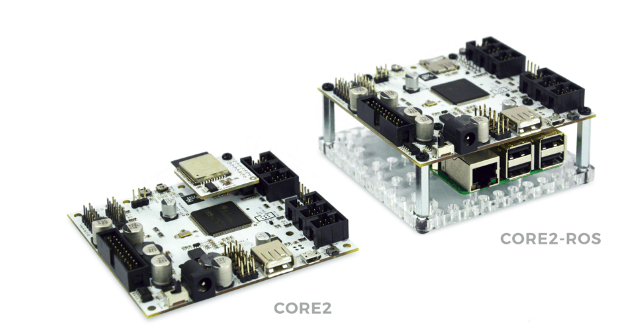
CORE2 控制器有两种配置。第一款是采用 ESP32 Wi-Fi 模块的,专用于需要低功耗和实时、安全遥控的机器人应用。第二款,称为 CORE2-ROS,基本上是将两块板子集成到了一起:
- 使用实时操作系统(RTOS)的实时微控制器并集成电机、编码器和传感器接口的电路板
- 带有 ROS(Robot Operating System)包的运行 Linux 的单板计算机(SBC)和其他软件工具。
“实时”电路板做底层工作。它包含高效的 STM32F4 系列微控制器,非常适用于驱动电机、读码器、与传感器通信,并控制整个机电或机器人系统。在大多数应用中,CPU 负载不超过几个百分点,实时操作由基于 RTOS 的专用编程框架支持。我们还保证与 Arduino 库的兼容性。大多数任务都在微控制器外设中处理,如定时器、通信接口、ADC 等,它具有中断和 DMA 通道的强大支持。简而言之,对于具有其他任务的单板计算机来说,这不是一项任务。
另一方面,很显然,现代先进的机器人程序不能仅仅基于微控制器,原因如下:
- 自动机器人需要大量的处理能力来执行导航、图像和声音识别、移动等等,
- 编写先进的软件需要标准化才能有效 - SBC 在行业中越来越受欢迎,而对于为 SBC 编写的软件也是如此,这与 PC 电脑非常相似
- SBC 每年都变得越来越便宜 – Husarion 认为,结合这两个世界在机器人技术方面是非常有益的。
CORE2-ROS 控制器有两种配置:Raspberry Pi 3 或 ASUS Tinker Board。CORE-ROS 运行于 Ubuntu、Husarion 开发和管理工具以及 ROS 软件包上。
下篇文章将介绍为何 Husarion 决定使用 Ubuntu 。
作者:Dominik Nowak 译者:geekpi 校对:wxy
本文转载来自 Linux 中国: https://github.com/Linux-CN/archive
对这篇文章感觉如何?
太棒了
0
不错
0
爱死了
0
不太好
0
感觉很糟
0
You may also like




More in:Linux中国

捐赠 Let's Encrypt,共建安全的互联网
随着 Mozilla、苹果和谷歌对沃通和 StartCom 这两家 CA 公司处罚落定,很多使用这两家 CA 所签发证书的网站纷纷寻求新的证书签发商。有一个非盈利组织可以为大家提供了免费、可靠和安全的 SSL 证书服务,这就是 Let's Encrypt 项目。现在,它需要您的帮助
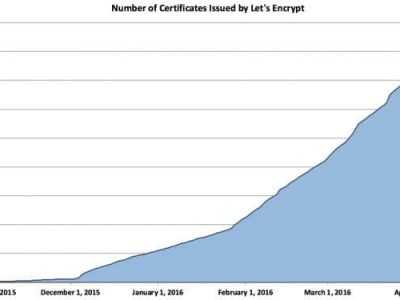
Let's Encrypt 正式发布,已经保护 380 万个域名
由于 Let's Encrypt 让安装 X.509 TLS 证书变得非常简单,所以这个数量增长迅猛。

关于Linux防火墙iptables的面试问答
Nishita Agarwal是Tecmint的用户,她将分享关于她刚刚经历的一家公司(印度的一家私人公司Pune)的面试经验。在面试中她被问及许多不同的问题,但她是iptables方面的专家,因此她想分享这些关于iptables的问题和相应的答案给那些以后可能会进行相关面试的人。 所有的问题和相应的答案都基于Nishita Agarwal的记忆并经过了重写。 嗨,朋友!我叫Nishita Agarwal。我已经取得了理学学士学位,我的专业集中在UNIX和它的变种(BSD,Linux)。它们一直深深的吸引着我。我在存储方面有1年多的经验。我正在寻求职业上的变化,并将供职于印度的P
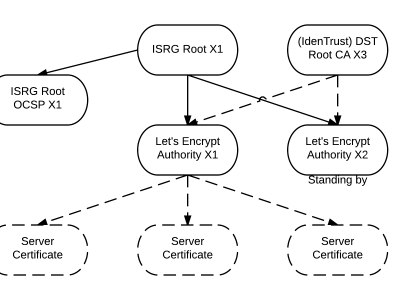
Lets Encrypt 已被所有主流浏览器所信任
旨在让每个网站都能使用 HTTPS 加密的非赢利组织 Lets Encrypt 已经得了 IdenTrust的交叉签名,这意味着其证书现在已经可以被所有主流的浏览器所信任。从这个里程碑事件开始,访问者访问使用了Lets Encrypt 证书的网站不再需要特别配置就可以得到 HTTPS 安全保护了。 Lets Encrypt 的两个中级证书 ...
关注 LinuxStory 微信公众号,获取最新的 Linux 和操作系统资讯,每天为您带来热腾腾的开源新闻与新鲜温暖的科技故事。